ER-sarjan joustava yhteistyörobotti
Tekniset parametrit
| ER3 | ER7 | ER3 Pro | ER7 Pro | |||||
| Tekniset tiedot | ||||||||
| Ladata | 3 kg | 7 kg | 3 kg | 7 kg | ||||
| Työskentelysäde | 760 mm | 850 mm | 760 mm | 850 mm | ||||
| Kuollut paino | Noin 21 kg | Noin 27 kg | Noin 22 kg | Noin 29 kg | ||||
| Vapausaste | 6 pyörivää niveltä | 6 pyörivää niveltä | 7 pyörivää niveltä | 7 pyörivää niveltä | ||||
| Keskimääräinen keskiarvo | >35000 tuntia | >35000 tuntia | >35000 tuntia | >35000 tuntia | ||||
| Virtalähde | 48 V tasavirta | 48 V tasavirta | 48 V tasavirta | 48 V tasavirta | ||||
| Ohjelmointi | Vedä opetus ja graafinen käyttöliittymä | Vedä opetus ja graafinen käyttöliittymä | Vedä opetus ja graafinen käyttöliittymä | Vedä opetus ja graafinen käyttöliittymä | ||||
| Suorituskyky | ||||||||
| TEHO | Keskimäärin | Huippuarvo | Keskimäärin | Huippuarvo | Keskimäärin | Huippuarvo | Keskimäärin | Huippu |
| KULUTUS | 200 W | 400 W | 500 W | 900 W | 300 W | 500 W | 600 W | 1000 W |
| Turvallisuus | > 22 säädettävää turvatoimintoa | > 22 säädettävää turvatoimintoa | > 22 säädettävää turvatoimintoa | > 22 säädettävää turvatoimintoa | ||||
| Sertifiointi | Noudattaa standardia ”EN ISO 13849-1, Cat. 3, PL d, EU CE -sertifiointi” | Noudattaa standardia ”EN ISO 13849-1, Cat. 3, PL d, EU CE -sertifiointi” | Noudattaa standardia ”EN ISO 13849-1, Cat. 3, PL d, EU CE -sertifiointi” | Noudattaa standardia ”EN ISO 13849-1, Cat. 3, PL d, EU CE -sertifiointi” | ||||
| Voiman tunnistus, työkalun laippa | voima, XyZ | Voimamomentti, XyZ | Voima, xyZ | Voimamomentti, XyZ | Voima, xyZ | Voimamomentti, XyZ | Voima, xyZ | Voimamomentti, xyz |
| Voimanmittauksen resoluutiosuhde | 0,1 N | 0,02 Nm | 0,1 N | 0,02 Nm | 0,1 N | 0,02 Nm | 0,1 N | 0,02 Nm |
| Voimanohjauksen suhteellinen tarkkuus | 0,5 N | 0,1 Nm | 0,5 N | 0,1 Nm | 0,5 N | 0,1 Nm | 0,5 N | 0,1 Nm |
| Säädettävä karteesisen jäykkyyden alue | 0–3000 Nm/m², 0–300 Nm/rad | 0–3000 Nm/m², 0–300 Nm/rad | 0–3000 Nm/m², 0–300 Nm/rad | 0–3000 Nm/m², 0–300 Nm/rad | ||||
| Käyttölämpötila-alue | 0–40 °C | 0–40 °C | 0–40 °C | 0–40 ℃ | ||||
| Kosteus | 20–80 % suhteellinen kosteus (ei tiivistyvä) | 20–80 % suhteellinen kosteus (ei tiivistyvä) | 20–80 % suhteellinen kosteus (ei tiivistyvä) | 20–80 % suhteellinen kosteus (ei tiivistyvä) | ||||
| 180°/s | ||||||||
| 180°/s | ±0,03 mm | ±0,03 mm | ±0,03 mm | ±0,03 mm | ||||
| 180°/s | Työn laajuus | Suurin nopeus | Työn laajuus | Suurin nopeus | Työn laajuus | Suurin nopeus | Työn laajuus | Suurin nopeus |
| 180°/s | ±170° | 180°/s | ±170° |
| ±170° | 180°/s | ±170° | 110°/s |
| Akseli 2 | ±120° | 180°/s | ±120° |
| ±120° | 180°/s | ±120° | 110°/s |
| Akseli 3 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Akseli 4 | ±170° | 180°/s | ±170° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Akseli 5 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Akseli 6 | ±360° | 180°/s | ±360° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Akseli 7 | ------ | ------ | ------ | ------ | ±360° | 180°/s | ±360° | 180°/s |
| Suurin nopeus työkalun päässä | ≤3 m/s | ≤2,5 m/s | ≤3 m/s | ≤2,5 m/s | ||||
| Ominaisuudet | ||||||||
| IP-suojausluokka | IP54 | IP54 | IP54 | IP54 | ||||
| ISO-puhdastilaluokka | 5 | 6 | 5 | 6 | ||||
| Melu | ≤70 dB(A) | ≤70 dB(A) | ≤70 dB(A) | ≤70 dB(A) | ||||
| Robotin asennus | Muodollisesti asennettu, ylösalaisin asennettu, sivulle asennettu | Muodollisesti asennettu, ylösalaisin asennettu, sivulle asennettu | Muodollisesti asennettu, ylösalaisin asennettu, sivulle asennettu | Muodollisesti asennettu, ylösalaisin asennettu, sivulle asennettu | ||||
| Yleiskäyttöinen I/O-portti | Digitaalinen tulo4 | Digitaalinen tulo 4 | Digitaalinen tulo 4 | Digitaalinen tulo 4 | ||||
|
| Digitaalinen lähtö4 | Digitaalinen lähtö 4 | Digitaalinen lähtö4 | Digitaalinen lähtö 4 | ||||
| Suojaus-I/O-portti | Ulkoinen hätäpysäytys 2 | Ulkoinen hätäpysäytys2 | Ulkoinen hätäpysäytys 2 | Ulkoinen hätäpysäytys2 | ||||
|
| Ulkoinen turvaovi2 | Ulkoinen turvaovi 2 | Ulkoinen turvaovi 2 | Ulkoinen turvaovi 2 | ||||
| Työkaluliittimen tyyppi | M8 | M8 | M8 | M8 | ||||
| Työkalun I/O-virtalähde | 24 V / 1 A | 24 V / 1 A | 24 V / 1 A | 24 V / 1 A | ||||
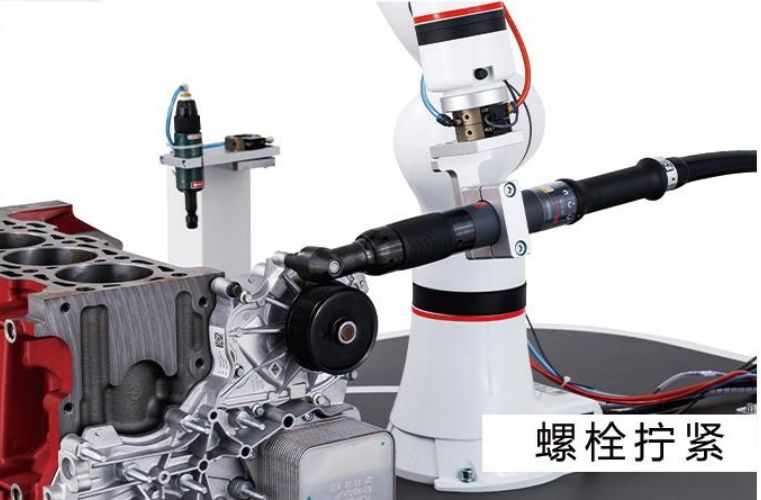
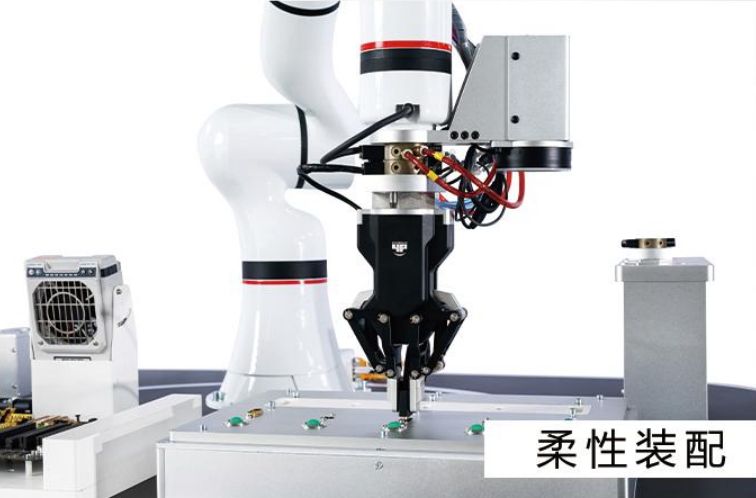
Teollisuussovellukset
XMate-joustavat yhteistyörobotit sopivat monenlaisiin prosessisovelluksiin, kuten joustavaan kokoonpanoon, ruuvilukitukseen, tarkastuksiin ja mittauksiin, kuljetukseen, materiaalien liimapinnoitteen poistamiseen, laitteiden huoltoon jne. Ne voivat auttaa kaikenkokoisia yrityksiä parantamaan tuottavuutta ja saavuttamaan joustavan automaation.